Automatyczna identyfikacja tablic rejestracyjnych (Automated Number Plate Recognition /Licence Plate Recognition) z roku na rok staje się bardziej interesującym tematem. Możliwość „chwytania” numerów rejestracyjnych znajduje, bowiem bardzo szerokie zastosowanie. Od kontroli przejazdu i transportu, pobierania opłat za przejazd, przez badanie prędkości średniej na odcinku drogi, statystykę, aż do sterowania ruchem i wyszukiwania pojazdów. Podstawa prawidłowego działania systemu identyfikacji tablic rejestracyjnych jest uzyskanie obrazu wysokiej jakości, czyli klarownego i płynnego nagrania wideo, na którym widać przejeżdżający pojazd. Nie musi, a nawet nie powinien to być cały pojazd wraz z otoczeniem – wystarczy przód lub tył, tak aby tablica rejestracyjna na obrazie miała odpowiedni rozmiar w stosunku do całego kadru. Ponadto, tablica powinna zostać uchwycona pod jak najmniejszym katem bocznym, aby zminimalizować ryzyko przekształcenia cyfr i liter (np. litera O w cyfrę 0, cyfra 8 na B itp). Obraz taki musi być uzyskiwany bez względu na warunki oświetleniowe, pogodowe, oślepiające reflektory i prędkość pojazdu. Ten ostatni parametr jest tak istotny, ponieważ kamera najczęściej musi uchwycić numer rejestracyjny w ruchu. Jeżeli jest ciemno i szybkość migawki w kamerze będzie zbyt niska w stosunku do prędkości pojazdu, otrzymamy nieczytelny, rozmazany numer. Zatem kluczowe jest wybranie odpowiedniej kamery, obiektywu, promiennika podczerwieni o odpowiednim zasięgu i zamontowanie tego zestawu w odpowiednim miejscu (odległość, wysokość, katy boczne).
Ile pasów ruchu obsłuży jedna kamera ?
Miejsce montażu i liczba kamer do identyfikacji tablic są zależne od typu zastosowanych urządzeń. Z reguły projektuje się jedna kamerę na pas ruchu o szerokości dochodzącej do 4 m. Warto zauważyć, że pas ruchu może być dwukierunkowy, czyli może być jednocześnie wjazdem i wyjazdem. W przypadku jezdni szerszej ni_ 4 m zalecane jest zawężenie pasa ruchu poprzez namalowanie oznaczeń poziomych, ustawienie pachołków, słupków itp. Ewentualnie można zainstalować dwie kamery obok siebie w taki sposób, aby kadry nachodziły na siebie. Jednak w takim przypadku od czasu do czasu numer może zostać zapisany w bazie podwójnie (będzie widoczny jednocześnie na obu kamerach).

Jakie kamery zapewnia odpowiedni obraz?
Przede wszystkim, do identyfikacji tablic nie potrzebujemy kamer kolorowych, tym bardziej że maja one współpracować w trybie czarno-białym z włączonym non-stop promiennikiem podczerwieni. Wskazane jest zatem stosowanie kamer czarno-białych, które przy stosowaniu szybkiej migawki uzyskują w ciemności bardziej klarowny obraz niż kamery kolorowe. Nie tylko ze względu na jasność i kontrast, ale tak że mniejsza ilość szumu. Dodatkowo, światło promiennika podczerwieni odbije się od refleksyjnego tła tablicy rejestracyjnej (dotyczy tablic białych, tzw. unijnych – tablice czarne starszego typu są niestety odczytywane prawidłowo tylko w dzień). Konieczne jest stosowanie kamer z funkcjami BLC, HLC, Eclipse i pokrewnymi, które służą do tłumienia świateł z reflektorów. Kamera nie może być wyposażona w funkcje automatycznie regulowanej ostrości. Ostrość należy ustawić idealniena punkt odczytu, który musi się znajdować w zasięgu promiennika. Promiennik powinien skupiać snop światła na tablicy rejestracyjnej, zamiast rozpraszać światło podczerwone na otoczenie pojazdu.

Odczyt z obrazu wideo czy ze stop-klatki?
Nie spotkałem do tej pory systemu identyfikacji tablic rejestracyjnych, który skutecznie odczytywałby numery na podstawie tylko pojedynczego obrazu (pojedynczej klatki). Z praktyki wynika, że im bardziej płynny obraz wideo, czyli więcej klarownych obrazówpojazdu i numeru rejestracyjnego uzyskamy, tym system będzie miał większa szanse odczytać go prawidłowo. Bardzo istotne jest wiec przechwycenie możliwie dużej liczby klatek na sekundę (typowo 25 fps). Mechanizmy odczytu moga byc realizowane z wykorzystaniem sztucznej inteligencji, bazującej na technologii sieci neuronowych. Tak zaawansowane mechanizmy zapewniają bardzo wysoka skuteczność, ale wymagają dobrego jakościowo i kompletnego materiału wideo do analizy. W zależności od typu systemu, odczyt może być realizowany w różnych jego punktach, najczęściej w punkcie kamerowym lub w centrali.
Odczyt w punkcie kamerowym, czy....
W takim rozwiązaniu odczytu dokonuje sama kamera lub podłączony do niej moduł IP (np. mini-wideoserwer IP). W obu przypadkach sa to zaawansowane urządzenia sieciowe, które samodzielnie analizują obraz wideo, a następnie dostarczają siecią IP do serwera w centrali rezultat operacji, czyli niewielka ilość danych (np. przechwycony numer, zdjęcie, data/czas, lokalizacja kamery). Zaleta takiego mechanizmu jest, że do poprawnego działania wystarczy bardzo mała przepustowość łącza. Dzięki temu połączenia można realizować bezprzewodowo, nawet na duże odległości (np. z wykorzystaniem sieci telefonii komórkowej). Ze względu na specyfikę działania, wysokie ceny urządzeń i skomplikowany serwis, tego rodzaju systemy stosuje się głównie na obszarach niezabudowanych, przede wszystkim do monitorowania ruchu drogowego, rzadziej do kontroli przejazdu i transportu.
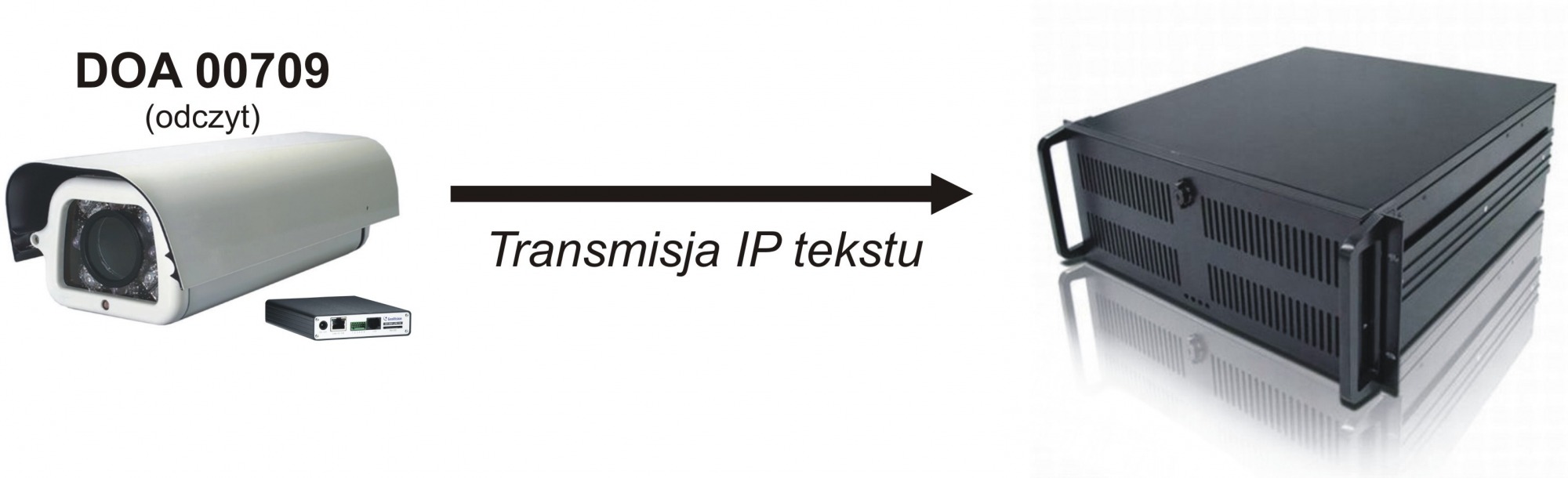
Rys. 1. Analiza obrazu wideo i identyfikacja w punkcie kamerowym. Transmisja rezultatów do centrali.

Rys. 2. Przykład bezprzewodowego modułu IP do identyfikacji tablic rejestracyjnych z kamery analogowej.
....odczyt w centrali?
W tym przypadku kamera stanowi tylko źródło obrazu, czyli generuje wysokiej jakości materiał do analizy. Musi on zostać bez straty jakości dostarczony do centrali, gdzie serwer zrealizuje odczyt. To praktycznie wyklucza łączność bezprzewodowa, która zwykle oznacza pogorszenie jakości. Natomiast przewodowa bezstratna transmisja obrazu na odległości ok. 2 km jest jak najbardziej możliwa – aktywnie, jednym torem skrętki. Transmisja na większe odległości wymaga zastosowania znacznie droższej technologii światłowodowej. Ze względu na wymagana infrastrukturę przewodowa, stosunkowo niskie ceny urządzeń i niezbyt skomplikowany serwis, tego rodzaju systemy identyfikacji tablic stosuje się przede wszystkim na obszarach zabudowanych do kontroli przejazdów i transportu, np. na parkingach, w połączeniu z systemami pobierania opłat, w zakładach przemysłowych i firmach transportowych, w połączeniu z wagami drogowymi itp.
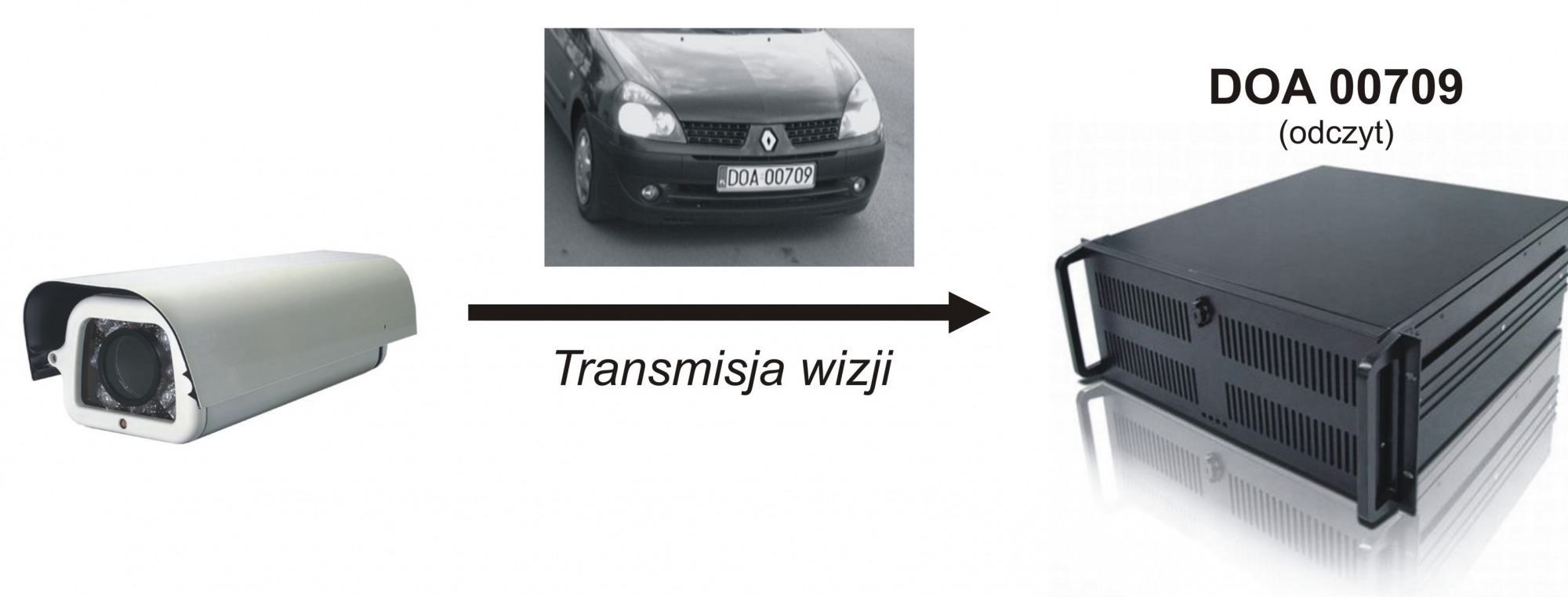
Rys. 3. Transmisja wizji z punktu kamerowego do centrali. Analiza i identyfikacja na serwerze w centrali.
Stacje monitorowania
Bez względu na to, czy system realizuje identyfikacje w punkcie kamerowym, czy w centrali, rezultaty identyfikacji (dane wynikowe) są archiwizowane na serwerze w centrali. Następnie, mogą one docierać po sieci IP do wielu stacji monitorowania. Operatorzy otrzymują na bieżąco uchwycone numery rejestracyjne ze zdjęciami pojazdów, maja możliwość uruchomienia podglądu na żywo z kamery, wprowadzania pojazdów na „biała” i „czarna” listę, zdalnego zarzadzania serwerami itp. Po wykryciu określonego pojazdu, automatycznie otrzymują powiadomienia graficzne, dźwiękowe, e-mail/SMS.
Detekcja ruchu, czy czujniki pojazdów?
Najczęściej proces identyfikacji tablic inicjuje się wykryciem ruchu (analiza obrazu) lub wejściem alarmowym, do którego podłączamy czujniki pojazdów, fotokomórki, przekaźniki z wagi itp. Detekcja ruchu jest niestety bardziej zawodna, szczególnie przy słabym oświetleniu. Natomiast sygnał alarmowy praktycznie gwarantuje, że numer pojazdu zostanie uchwycony zawsze w odpowiednim momencie. Warto o tym pamiętać tym bardziej, że stosowanie czujników tylko nieznacznie podnosi całkowite koszty sprzętu i nieco komplikuje instalacje.
Inteligentna automatyka
W zależności od tego, czy rozpoznany pojazd jest zarejestrowany w bazie i czy ma ważna przepustkę, czy też pojawia się w danej lokalizacji po raz pierwszy, system może z odpowiednimi opóźnieniami wykonać szereg czynności, które będą dodatkowo uwarunkowane innymi parametrami. Na przykład, możemy zdefiniować prosta regułę, na podstawie której system natychmiast otworzy szlaban przed zarejestrowanym pojazdem wjeżdżającym, a przed zarejestrowanym pojazdem wyjeżdżającym otworzy go dopiero po uzyskaniu sygnału z wagi drogowej potwierdzającej koniec ważenia; natomiast pojawienie się nowego pojazdu w systemie spowoduje powiadomienie operatora alarmem dźwiękowym. Prosta automatyzacje możemy uzyskać przy pomocy sygnałów wejść i wyjść przekaźnikowych, którymi zwykle kontroluje się takie urządzenia jak szlabany, alarmy, bramy, sygnalizatory świetlne, dźwiękowe itd. Kiedy dodamy do tego możliwość uruchamiania zewnętrznych programów i skryptów w zależności od wyniku rozpoznania, uzyskujemy prawie nieograniczone możliwości inteligentnej automatyzacji systemu.
 Rys. 4. Prawidłowe zdjęcie zrobione w ciagu dnia na wadze drogowej.
Rys. 4. Prawidłowe zdjęcie zrobione w ciagu dnia na wadze drogowej.
 Rys. 5. Prawidłowe zdjęcie zrobione w nocy na drodze krajowej przy prędkości 70-80 km/h.
Rys. 5. Prawidłowe zdjęcie zrobione w nocy na drodze krajowej przy prędkości 70-80 km/h.
 Rys. 6. Zdjęcie nieprawidłowe zrobione w nocy na wadze drogowej (numer jest niewyraźny, ponieważ kamera nie radzi sobie z oślepiającymi reflektorami pojazdu, a promiennik nieskupia światła na tablicy rejestracyjnej).
Rys. 6. Zdjęcie nieprawidłowe zrobione w nocy na wadze drogowej (numer jest niewyraźny, ponieważ kamera nie radzi sobie z oślepiającymi reflektorami pojazdu, a promiennik nieskupia światła na tablicy rejestracyjnej).
Przykład skutecznego systemu ANPR / LPR
Na rynku polskim wciąż mamy niewiele skutecznych systemów identyfikacji tablic rejestracyjnych. Niektóre z tych systemów to kosztowne aplikacje po kilkanaście tys. złotych za pas ruchu, realizowane i dostosowywane na potrzeby konkretnych projektów, dużych inwestycji. Zdobyłem spore doświadczenie w trakcie wielu instalacji kilkukamerowych (zwykle 2-8 kamer) systemów GV-LPR produkowanych przez firmę GeoVision. Systemy te mogę z czystym sumieniem polecić dla większości projektów, ponieważ cechują się bardzo wysoka skutecznością i prawie nieograniczonymi możliwościami integracji z innymi systemami, przy zachowaniu rozsądnej ceny (kilka tys. złotych za pas ruchu). Silnik systemu GV-LPR wykorzystujący technologie sieci neuronowych, został gruntownie przetestowany w instalacjach na całym świecie. Jest on bezustannie udoskonalany wraz z pojawianiem się nowych tablic rejestracyjnych lub wykryciem drobnych problemów w nowych projektach. W odróżnieniu od wielu innych silników ANPR / LPR, w dobrze wykonanej instalacji naprawdę potrafi on uzyskać skuteczność na poziomie 95%, poświęcając na jedna tablice rejestracyjna zaledwie 200 milisekund czasu.O wysokiej skuteczności systemu decydują również:
- możliwość definiowania na obrazach z kamer obszarów rozpoznawania tablic i detekcji ruchu
- możliwość wielokrotnego próbkowania rozpoznawania w celu uzyskania najlepszego
- możliwość dopuszczenia błędnie odczytanego jednego lub paru znaków i dopasowania wyniku do numeru istniejącego w bazie.
Bazy danych
System GV-LPR zawiera dwie najważniejsze bazy: dziennik pojazdów rozpoznawanych i lista pojazdów zarejestrowanych. Pierwsza z nich jest swego rodzaju dziennikiem rozpoznawania, który może zostać poddany wyszukiwaniu na podstawie m.in. takich kryteriów jak numer rejestracyjny i nazwa pojazdu, nazwisko i inne dane kierowcy, data odczytu, wykorzystana kamera LPR. Każdy wpis dziennika jest związany ze zdjęciem wykonanym w momencie rozpoznania pojazdu. Dodatkowo, w systemie GV-LPR zintegrowanym z systemem nadzoru GV istnieje możliwość automatycznego wiązania wpisu z dziennika z nagraniem przechowywanym na dysku rejestratora. Baza pojazdów zarejestrowanych jest tak skonstruowana, że instalator może bez problemu zaimportować do niej dane pojazdów z popularnych formatów (np. Microsoft Excel). Podobnie, istnieje możliwość wyeksportowania dziennika rozpoznanych pojazdów do bazy danych w formacie Microsoft Access lub bezpośrednio na stronę WWW.
Integracja z innymi systemami
System GV-LPR został wyposażony w funkcje przesyłania wybranych i dowolnie sformatowanych danych pojazdów oraz parametrów rozpoznawania, przez port szeregowy, plik tekstowy i siec IP. Ostatnia z tych opcji wymaga wyjaśnienia. Dotyczy to dowolnej aplikacji pod Windows, w której programista użyje kontrolki OCX, służącej do przekazywania numerów tablic i zdjęć przez siec IP. Bazy systemowe zostały zbudowane w oparciu o bardzo popularny i łatwy do przetwarzania format danych MDB (stosowany np. w aplikacji bazodanowej Microsoft Access, znanej z pakietu Microsoft Office). Istnieje też możliwość replikacji tych baz lub bezpośredniego podłączenia systemu do serwera SQL. Możliwości wykorzystania tych funkcji i baz danych są ograniczone wyłącznie umiejętnościami i wyobraźnią instalatora. Na przykład, wyobraźmy sobie prosty system kontroli wjazdów/wyjazdów z ważeniem ciężarówek. Załóżmy, że składa się on z dwóch kamer LPR, dwóch czujek pojazdów, dwóch szlabanów i wagi drogowej. Kamera 1 to wjazd, kamera 2 to wyjazd. Czujka 2 daje sygnał na wejściu, wiec system LPR rozpoczyna procedurę rozpoznawania przy wyjeździe – następuje odczyt tablicy z kamery 2. Pojazd zostaje rozpoznany jako zarejestrowany, wiec system otwiera szlaban 2 i pojazd może przejechać dalej, na wagę. System LPR przesyła do wagi drogowej sygnał do rozpoczęcia ważenia, jednocześnie podając jej numer rejestracyjny rozpoznanego pojazdu (np. przez port szeregowy). Waga kończy ważenie i przesyła do wewnętrznego systemu kontroli ruchu, że pojazd o określonym numerze rejestracyjnym, ważący określoną liczbę ton, opuścił teren przedsiębiorstwa w dniu, o godzinie itd. Ten przykładowy i stosunkowo prosty system umożliwiłby prowadzenie kontroli nad wywozem wartościowych towarów w (pozornie) pustych ciężarówkach opuszczających teren zakładu.
Gotowe rozwiązanie
Gotowymi do instalacji i użytkowania implementacjami polecanego tu systemu GV-LPR, są rackowe serwery identyfikacji tablic o nazwie RALPR (wersja podstawowa) lub RPLPR (wersja zaawansowana). Typowy komplet urządzeń składa się ponadto ze specjalizowanych kamer analogowych GV-IRCAM i modułu GV-IOBOX umożliwiającego podłączenie urządzeń wejścia/wyjścia, np. szlabanów, czujek pojazdów, przycisków, bram, sygnalizatorów itp.
 Rys. 7. Serwer identyfikacji tablic rejestracyjnych RPLPR.
Rys. 7. Serwer identyfikacji tablic rejestracyjnych RPLPR.
Serwer tego typu może obsłużyć do 8 kamer identyfikacji tablic (analogowych lub IP) oraz do 8 kamer dodatkowych z zapisem zdjęć lub wideo kierowcy, otoczenia pojazdu itp. Dodatkowo, źródłem wideo może być także zarejestrowany wcześniej plik AVI o odpowiedniej rozdzielczości. Serwery rozpoznają tablice pojazdów pochodzące z jednego z ponad 30 krajów. Zdjęcie pojazdu i zdjęcie dodatkowe w formacie JPEG, oraz ewentualnie nagranie wideo w formacie AVI, zostaną zarchiwizowane na serwerze i zabezpieczone znakami wodnymi. Na podstawie odczytanego numeru rejestracyjnego serwer może badać średnią prędkość pojazdu (dwie kamery na odcinku drogi), zliczać pojazdy znajdujące się na parkingu, badać czas ich pobytu, co z kolei umożliwia integracje na przykład z systemem pobierania opłat. Oprogramowanie serwera działa w języku polskim. Serwerem można sterować zdalnym pulpitem poprzez łącza internetowe i lokalne. Wraz z serwerem, dostarczane jest bezpłatne polskojęzyczne oprogramowanie GV-LPR Center do zainstalowania na stacji monitorowania. Oprogramowanie to może obsłużyć jednocześnie do 255 serwerów.

